

1. ข้อกำหนดด้านสมรรถนะทางไฟฟ้าของตัวควบคุมความเร็ว
(1) ช่วงแรงดันไฟฟ้า: DC5V-28V
(2) กระแสไฟฟ้าที่กำหนด: สูงสุด 2A เพื่อควบคุมมอเตอร์ที่มีกระแสไฟฟ้ามากกว่า สายไฟของมอเตอร์จะเชื่อมต่อโดยตรงกับแหล่งจ่ายไฟ ไม่ผ่านตัวควบคุม
(3) ความถี่เอาต์พุต PWM: 0~100KHz
(4) เอาต์พุตแรงดันอนาล็อก: 0-5V
(5) อุณหภูมิใช้งาน: -10℃ ถึง -70 ℃ อุณหภูมิจัดเก็บ: -30℃ ถึง -125 ℃
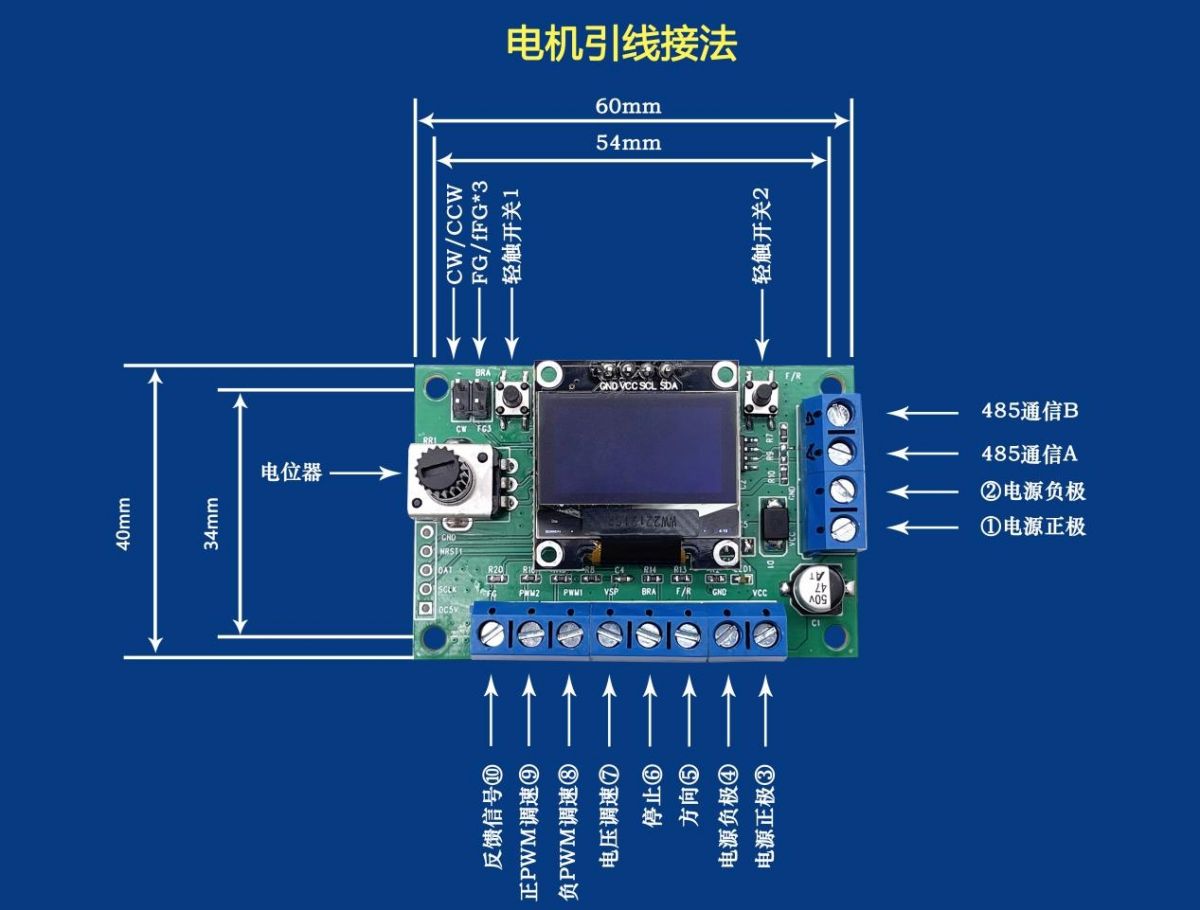
(6) ขนาดแผงไดร์เวอร์: ยาว 60 มม. x กว้าง 40 มม.

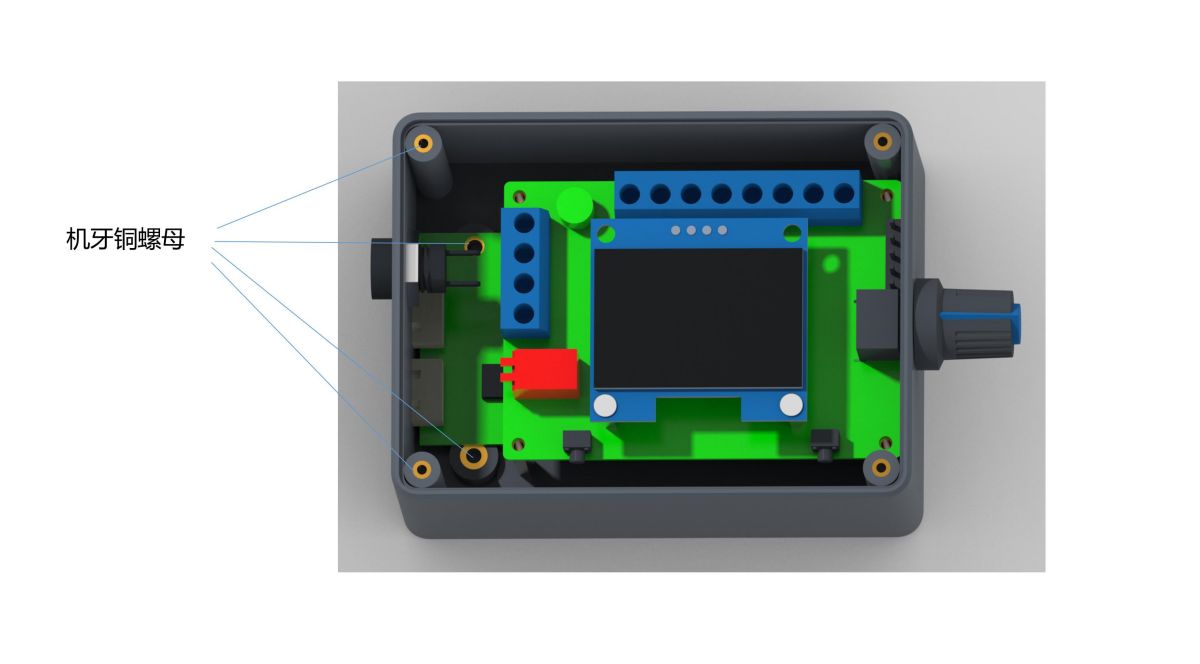
2. คำอธิบายการเดินสายและการทำงานภายในของตัวควบคุม
① ตัวควบคุม, อินพุตบวกของแหล่งจ่ายไฟมอเตอร์
② ตัวควบคุม, อินพุตกำลังมอเตอร์เป็นลบ
③ ขั้วบวกของแหล่งจ่ายไฟของมอเตอร์
④ ขั้วลบของแหล่งจ่ายไฟของมอเตอร์
⑤ เอาต์พุตระดับสูงและต่ำสำหรับการควบคุมการหมุนบวกและลบ ระดับสูง 5V ระดับต่ำ 0V ควบคุมโดยสวิตช์สัมผัส 2 (เดินหน้า/ถอยหลัง) ค่าเริ่มต้นคือระดับสูง
⑥ เอาต์พุตระดับสูงและต่ำของการควบคุมเบรก ระดับสูง 5V ระดับต่ำ 0V ควบคุมโดยสวิตช์สัมผัส 1 (BRA) เมื่อเปิดเครื่อง เอาต์พุตจะเป็นระดับสูงโดยค่าเริ่มต้น
7. เอาต์พุตแรงดันอนาล็อก (0~5V) อินเทอร์เฟซนี้เหมาะสำหรับรับสัญญาณแรงดันอนาล็อกเพื่อควบคุมความเร็วของมอเตอร์
⑧เอาต์พุต PWM1 แบบกลับทิศทาง อินเทอร์เฟซนี้เหมาะสำหรับมอเตอร์ที่รองรับการควบคุมความเร็วแบบ PWM โดยความเร็วจะแปรผกผันกับรอบการทำงาน
⑨เอาต์พุต PWM2 แบบส่งต่อ อินเทอร์เฟซนี้เหมาะสำหรับมอเตอร์ที่รองรับการควบคุมความเร็วแบบ PWM โดยความเร็วจะแปรผันตามรอบการทำงาน
⑦-⑨ การเปลี่ยนแปลงสัญญาณเอาต์พุตของอินเทอร์เฟซทั้งสามจะถูกปรับโดยใช้โพเทนชิโอมิเตอร์
⑩ สัญญาณป้อนกลับจากมอเตอร์
หมายเหตุ: ค่า FG/FG*3 ควรพิจารณาจากเวลาตอบสนองของมอเตอร์จริงว่าควรต่อจัมเปอร์หรือไม่ หากไม่มีจัมเปอร์ ค่าจะเท่ากับ FG หนึ่งเท่า หากมีจัมเปอร์ ค่าจะเท่ากับ FG*3 สามเท่า หลักการเดียวกันนี้ใช้ได้กับ CW/CCW ด้วย
3. ตั้งค่าพารามิเตอร์บางอย่างให้กับผู้ควบคุม
(1) การตั้งค่าความถี่: กดสวิตช์สัมผัส 1 ค้างไว้ก่อนเปิดเครื่อง อย่าปล่อย จากนั้นเปิดเครื่องควบคุม รอจนกว่าหน้าจอจะแสดง "FEQ:20K" เมื่อปล่อยปุ่ม จากนั้นแตะสวิตช์ 1 เพื่อลด และแตะสวิตช์ 2 เพื่อเพิ่ม ความถี่ที่ปรับได้จะตั้งตามความถี่ที่กำหนด ค่าเริ่มต้นจากโรงงานคือ 20KHz
(2) การตั้งค่าจำนวนขั้ว: ก่อนเปิดเครื่อง ให้กดสวิตช์สัมผัสเบา 1 และสวิตช์สัมผัสเบา 2 ค้างไว้พร้อมกัน อย่าปล่อย จากนั้นเปิดเครื่องควบคุม รอจนกว่าหน้าจอจะแสดง "จำนวนขั้ว: 1 ขั้ว" แล้วจึงปล่อยปุ่ม จากนั้นสวิตช์สัมผัสเบา 1 จะลดลง และสวิตช์สัมผัสเบา 2 จะเพิ่มขึ้น จำนวนขั้วที่ปรับได้คือจำนวนขั้วที่ออกแบบไว้สำหรับมอเตอร์ และค่าเริ่มต้นจากโรงงานคือ 1 ขั้ว
(3) การตั้งค่าการป้อนกลับ: ในรูปที่ 1 พิน FG/FG*3 ถูกตั้งค่าเป็นตัวคูณการป้อนกลับ ซึ่งตั้งค่าตามว่าตัวคูณการป้อนกลับของมอเตอร์เป็น 1 เท่าของ FG หรือ 3 เท่าของ FG โดยการเพิ่มจัมเปอร์แคปจะเป็น 3 เท่าของ FG และการไม่เพิ่มจัมเปอร์แคปจะเป็น 1 เท่าของ FG
(4) การตั้งค่าทิศทาง: ขา CW/CCW ในรูปที่ 1 คือการตั้งค่าทิศทางของมอเตอร์ในสถานะเริ่มต้น โดยจะตั้งค่าตามทิศทางการหมุนของมอเตอร์ว่าหมุนตามเข็มนาฬิกา (CW) หรือทวนเข็มนาฬิกา (CCW) เมื่อสายควบคุมทิศทางการหมุนของมอเตอร์ถูกแขวนไว้ หมุนทวนเข็มนาฬิกา (CCW) ต้องมีการเพิ่มฝาครอบข้าม และหมุนตามเข็มนาฬิกา (CW) ต้องไม่มีฝาครอบข้าม
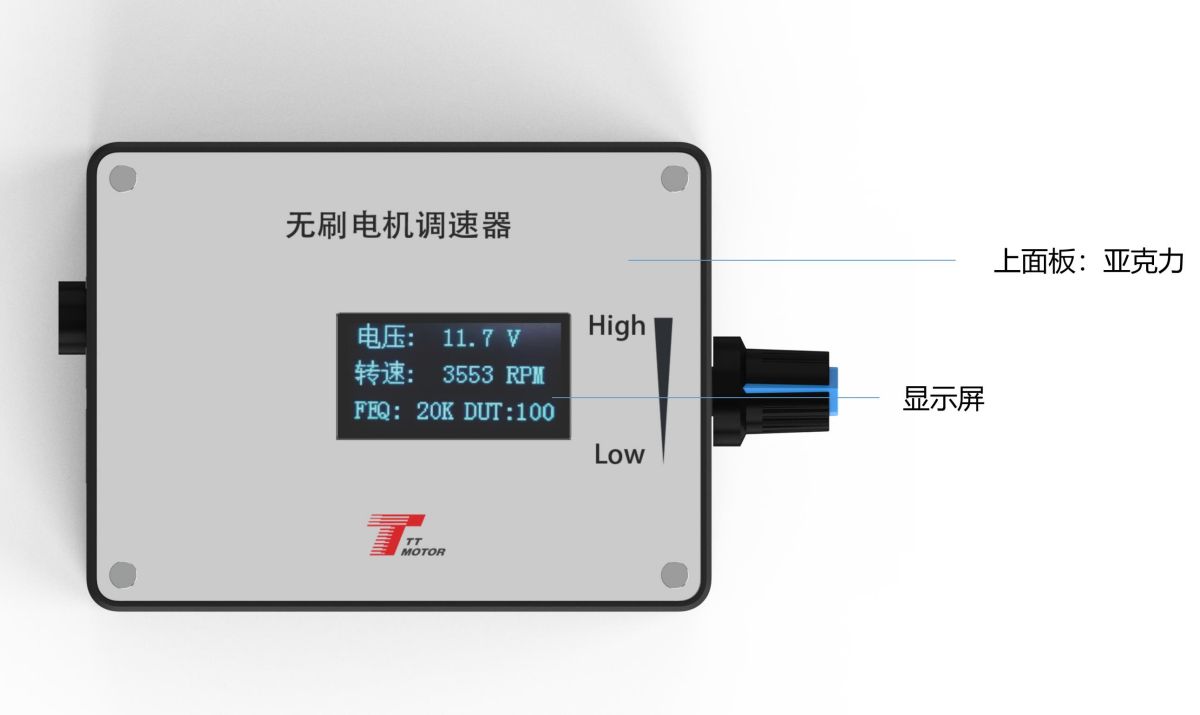
ส่วนหลัก: หน้าจอปัจจุบันแสดงค่าแรงดันไฟฟ้าขาเข้า ความเร็ว ความถี่ และรอบการทำงานของอุปกรณ์ทั้งสี่นี้เป็นหลัก โดยต้องตั้งค่าความเร็วเป็นโหมดแสดงผลปกติ FG/FG*3 และจำนวนขั้ว


4. ข้อควรระวังของผู้ว่าราชการจังหวัด
(1) แหล่งจ่ายไฟบวกและลบของตัวควบคุมจะต้องเชื่อมต่อตามคำแนะนำ และห้ามสลับขั้ว มิฉะนั้นตัวควบคุมจะไม่สามารถทำงานได้และจะทำให้ตัวควบคุมไหม้
(2) ตัวควบคุมใช้เพื่อจับคู่มอเตอร์กับอินเทอร์เฟซควบคุมข้างต้น
3, ⑤-⑨ พอร์ตทั้งห้าพอร์ตไม่สามารถจ่ายแรงดันไฟฟ้าได้เกิน 5V

วันที่โพสต์: 21 กรกฎาคม 2566